Ejercicios MBOT
Ejercicio 1
Programa el robot para que se mueva con las teclas de dirección del teclado
Con este programa vemos que el robot cuando ejecuta un código está esperando hasta que le damos otra orden (programación por eventos. Como ves una vez que tocas una tecla no puedes hacerlo parar.
Añade algo para que cuando pulsemos la tecla espacio el robot pare
Ejercicio 2
Programa el robot para que avance 1 metro, despúes gire 90º a la derecha, avance 2 metros, gire 45º grados a la izquierda y vuelva a avanzar 1/2 metro.
El siguiente bloque nos permite poner el color de los dos LEDs de a bordo al tono que queramos bien juntos o por separado.

Combinando estos bloques con esperas o con bucles de repeticiones podemos liar un buen festival.
Por cierto, observa que los LEDs se quedan en el último valor que les hayas dicho (como también hacían los motores), si quieres que al final de tu programa se apaguen, ponlos a cero, pero DÍSELO, no lo van a suponer.
Con este bloque podemos hacer que el buzzer (zumbador) pasivo de la placa mCore nos dé un tono a nuestra elección.

Predeterminadamente tenemos varias notas en varias octavas (A = La, B = Si... G = Sol), el número sería la octava. A4 corresponde al La central del teclado (440Hz).
La “pulsación” será la duración de la nota, “Medio” equivale a medio segundo, y así sucesivamente.
Si quieres puedes poner en el lugar de la nota un valor de frecuencia y en el de la pulsación una duración en milisegundos.
Si pones dos notas seguidas iguales verás que hay una pequeña “respiración” entre ellas, y si lo pones como Programa de mBot y miras el código Arduino, verás que está indicada con un delay(20). Si quisieras editar el código podrías eliminarla. Para tocar canciones no estorba, pero si quisiéramos hacer una “alarma de proximidad para aparcar” nos estorbaría.
Ejercicio 3
Haz que el robot reproduzca la canción de "La cucaracha ya no puede caminar". Mientras suena la canción los leds del robot deberán iluminarse con la combinación de colores que tu quieras.
Cuando termine la música los leds deberán apagarse.
Ejercicio 4 (Sensor de ultrasonidos)
Haz que el robot sea capaz de avanzar y evitar objetos. Puedes hacerlo de la siguientes formas:
- Cuando detecta el objeto gira siempre a la derecha
- Cuando detecta el objeto gira siempre a la izquierda
- Cuando detecta el objeto gira de forma aleatoria a derecha o izquierda. Para este método utilizaremos el bloque "NUMERO AL AZAR" que se encuentra en el apartado Operadores.
El sensor ultrasonido necesita un momentito para tomar bien la medida y hacer bien los cálculos necesarios, así que justo después de medir y antes de aplicar el condicional pondremos una pequeña espera de 0.1 segundo.
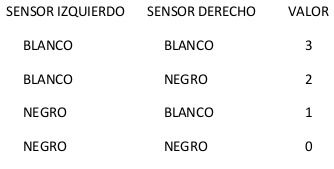
Ejercicio 5 (Sensor siguelíneas)
Haz que el robot detecte cuando se va a caer de la mesa y pare antes de hacerlo. El sensor está compuesto por dos sensores que devuelven un valor u otro según estén sobre una superficie blanca o negra, o sobre una que refleje la luz (blanca) o no (negra).